
Antrieb für die Loklift-Vitrine (v1)




Meine erste N-Anlage stand/hing in einer Ecke des Flurs an der Querwand und klappte an der Längswand entlang, wo die Vitrine hängen sollte. Im Idealfall konnte so ein ein Zug direkt durchfahren, aus der Vitrine zum Bahnhof und umgekehrt.
Das Foto vom Rohbau der Anlage ist vom Dezember 2008, seit dem grübelte die Vitrinenplanung immer wieder in meinem Kopf rum. Wurde im Streckendesign vorgesehen und beim Aufstellen der Anlage berücksichtigt. Allerdings hat der zündende Funke trotz gieriger Recherche bis zu diesem Frühjahr auf sich warten lassen. Im Baumarkt hatte ich einmal Schubkasten-Teleskopschienen in der Hand, da war dann klar, dass ich keine Acrylröhren an einen Fensterheber hänge oder einen teuren Linearantrieb mit nur 7cm Tiefe installiere. Ich habe in der ersten Version einfach so viel Leisten wie passen mit dem Mindestabstand für eine E-Lok mit ausgeklappten Stromabnehmer auf die Kastenseite der Schienen geschraubt. Hier waren genug Löcher vorhanden. Die Schrankseite der Schienen wollte ich dann an die Wand hängen. Leider war meine Wand sehr schlüpfrich und da ich keine großen Schrauben verwenden konnte (die Köpfe hätten die Schienen blockiert) lag der Haufen erstmal in der Ecke. Bis ich wieder eine Idee hatte und kurzerhand Leisten mit ordentlichen Schrauben an die Wand baute und darauf mit zarten Schräubchen meine Schienen. Die Gleistrassen hatte ich zuvor noch mit Rückwänden aus 4mm Pappelsperrholz versehen, was endlich auch Schubspannung (Parallelogramm!) aufnehmen konnte und damit dem Ganzen Stabilität verlieh. Jetzt konnte ich den ganzen Satz an nur einem Punkt nach oben und unten verschieben. Das erlaubte mir, einen einzigen Motor einzusetzen der dann lediglich eine Gewindestande drehen musste. Diese war in einem Winkel unterhalb der Vitrine gelagert, wo ich ein passendes Gewinde geschnitten hatte. Diesen Stand zeigen die Bilder oben.
Nun zum Antrieb. Nachdem ich also die Vitrine im Rohbau an der Wand hatte, war nun die nächste Frage die nach dem Antrieb. Hierfür kann man sich Getriebemotoren denken oder Schrittmotoren, die in meinem Fall eine Gewindestange drehen und damit den Vortrieb leisten. Zahnstangen oder Zahnriemen hatte ich auch überlegt, da hätte aber der Motor auch die Gewichtskraft der gesamten Vitrine halten müssen. Selbst wenn dann ein Schneckengetriebe mit bei gewesen wäre, müssten Halterungen und Lager irgendwie mit dem Vitrinengewicht klarkommen. Meine Gewindestange wird dagegen nur mit Druckkraft belastet (muss also genügen dick sein, um ein Knicken zu verhindern), welche relativ einfach im Lager zu halten ist. Unterhalb ist ein einfacher Winkel mit Gewindebohrung gleichzeitig Gleit- und Widerlager.
Motorsteuerung
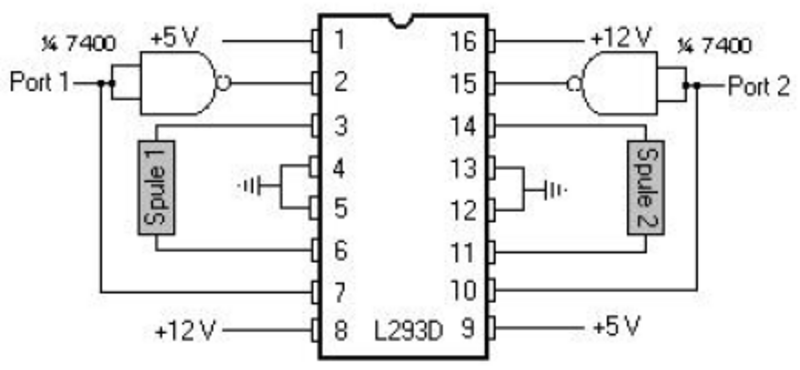
Eine kurze unbefriedigende Suche nach kleinen Getriebemotoren mit ausreichend Kraft brachte mich dazu, doch einen Schrittmotor unter die Liftvitrine zu schrauben. Dieser hat im Verhältnis zur geringen Drehgeschwindigkeit ein wirklich großes Drehmoment und daher die nötige Kraft, die Gewindestange unter Druckbelastung der gesamten Vitrine zu drehen. Leider brachte auch die Suche nach einer günstigen Elektronik für den Motor (den ich in meiner Grabbelkiste gefunden habe) keine befriedigenden Ergebnisse. Kauflösungen sind mir mit >100,- € zu teuer, die Selbstbaufreaks setzen auf programmierte Mikrocontroller. Dennoch habe ich die Ausführungen von Wolfgang Back studiert und zwei wichtige Punkte daraus für mich übernommen, den Treiberbaustein L293D, sowie die passende Signalfolge für einen Bipolaren-Schrittmotor.
Schaltungsentwicklung (PSpice)
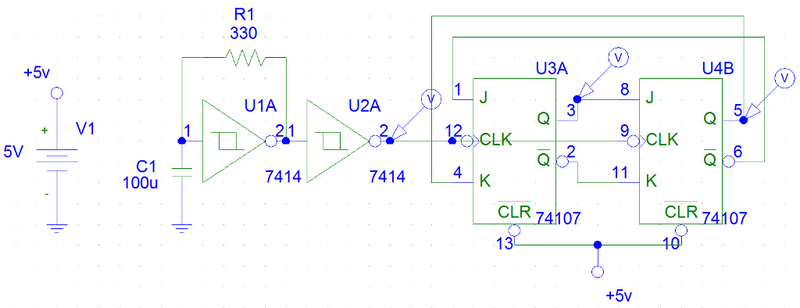
Das Grundprinzip ist eigentlich einfach. Für die Motorsteuerung benötigt man einen Takgenerator, der im Bereich von ca. 1-2kHz einen Takt generiert, mit dem der Motor gerade noch sicher klarkommt, sowie eine Möglichkeit den Takt zu halbieren und versetzt auf zwei Leitungen (A, B) auszugeben. Diese werden für das jeweilige zweite Spulenende negiert. An diese vier Leitungen kommt dann der Treiberbaustein. Die Drehrichtung kann durch Umpolen einer Spule oder durch Negieren eines der Signale A oder B erreicht werden. Mein erster Entwurf sollte mit so wenig Bauteilen wie möglich auskommen, sodass ich erstmal einen Taktgenerator mit zwei Schmitt-Trigger-Invertern aufbaute. Die übrigen Inverter des Schaltkreises hätte ich z.B. für die Drehrichtungsumkehr benutzen können. Die Signalerzeugung sollte eine Kaskade von zwei JK-Flipflops übernehmen. In der Simulation ergab sich auch das nötige Signalbild und die Negation für das jeweils zweite Spulenende war praktischerweise mit Q' schon eingebaut. Aber leider wurde das Taktverhalten der alten 74er Reihe in den aktuellen 74LS oder 74HCT geändert, sodass ich im Versuchsaufbau nur Müll erhalten habe. Die Schaltung hing davon ab, wann die Pegel von J und K auf Q gelegt werden, mit steigender oder fallender Taktflanke oder mit ts nach/vor einer Flanke...
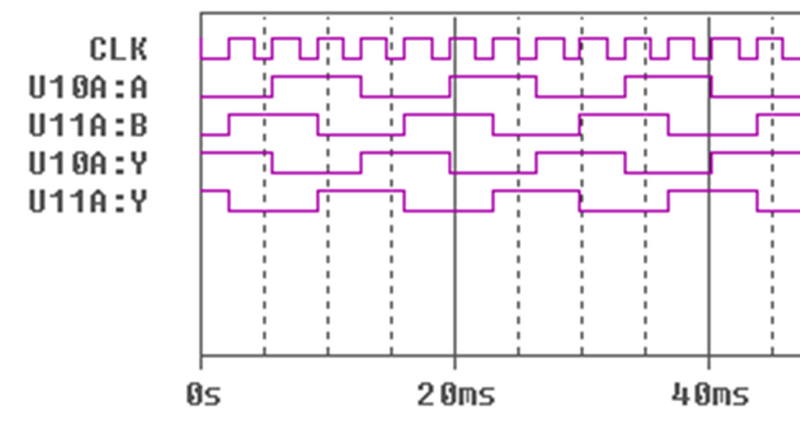
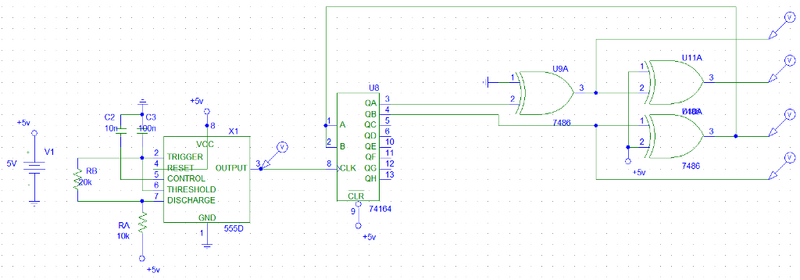
Ich habe noch eine Weile recherchiert und andere Flipflop-Lösungen evaluiert, aber alle waren letztendlich irgendwie ungeeignet und hätten eigentlich den gleichen Aufwand wie ein sauber arbeitendes Schieberegister bedeutet. Da auch der Taktgenerator zu wenig flexibel erschien, die Schaltung an den konkreten Motor anzupassen, habe ich letztendlich eine Schaltung mit dem Timer 555 und dem Schieberegister 74164 aufgebaut. In der Spice-Schaltung sind auch schon die jetzt externe Negation für die Spulen sowie der Drehrichtungsumkehrer (Gatter U9A) erkennbar. Hier habe ich den XOR Schaltkreis 7486 gewählt, da ich für die Drehrichtung nur den zweiten Eingangspin von U9A zwischen 5V oder Masse wechseln muss. Das Gatter bildet somit einen einfachen steuerbaren Inverter. Für die generelle Negation der zweiten Spulenenden, nehme ich die übrigen Gatter des selben Schaltkreises. Das Signalbild oben rechts zeigt das Simulationsergebnis dieser Schaltung.
Reale Schaltung (Eagle)
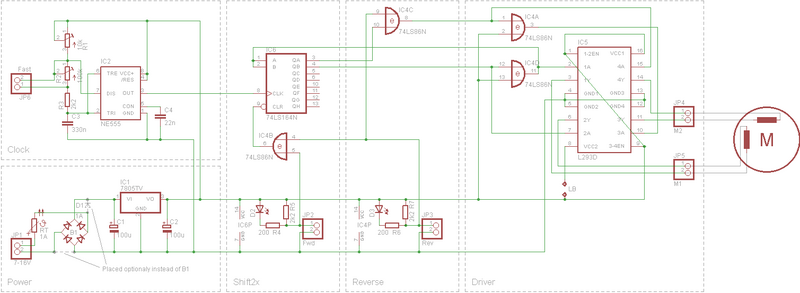
Da ich gute Erfahrungen mit Leiterplattenprototypen gemacht habe, beschloss ich, es nicht bei der Lochrasterplatte zu belassen, sondern eine schöne Platine zu designen (macht ja auch Spaß). Dazu wurde natürlich erstmal das Schaltbild vervollständigt. Die Schaltung enthält nun ein Netzteil, wodurch man jede Bahnspannung von 6 bis 16V ~ oder = nutzen kann. Hier kann man auch wählen, einen Brückengleichrichter zu verwenden, oder eine einfache Gleichrichtung, wenn man wie ich eine gemeinsame durchgehende Masse für die Schalteingänge nutzen will. Der Kaltleiter hat sich schon bei der Fahrspannung der Modellbahn bewährt und wirkt wieder als Sicherung indem er den Strom auf 1A begrenzt (je nach Motor zu wählen). Darüber liegt der Timer, der jetzt mit Serienschaltung von Poti und Festwiderständen noch flexibler ist und zwei Drehzahlen einstellbar macht. Mit Schließen von JP6 dreht der Motor schnell, einstellbar mit R1. Der Langsamgang wird mit R2 justiert.
Danach folgt das Schieberegister. Durch Schließen von JP2 geht das XOR-Gatter auf High (der zweite Pin liegt per R7 auf High), wodurch das Schieberegister freigegeben wird und loszählt. Ausgang A wird in der nächsten Stufe durch IC4C auf Wunsch negiert, was die Drehrichtung umkehrt. Dazu muss JP3 geschlossen werden. JP3 gibt selbst auch das Schieberegister frei, wodurch man für beide Anschlüsse einen Wechseltaster (TAST-AUS-TAST) verwenden kann.
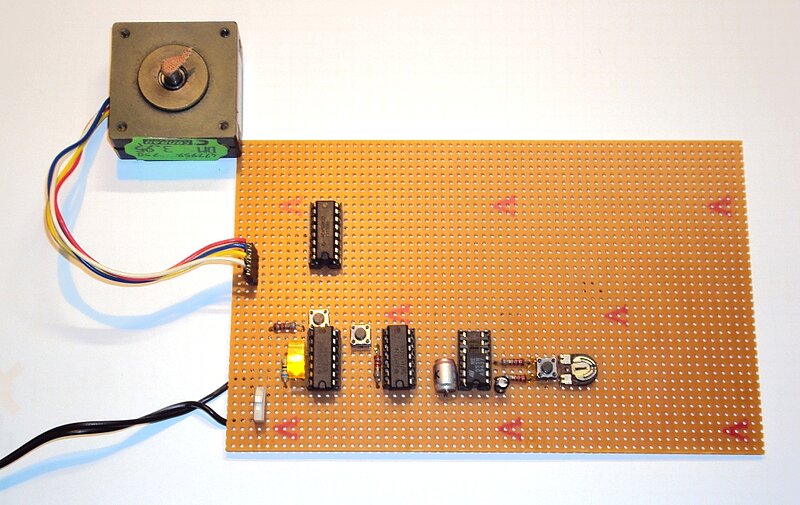
Die Treiberstufe sieht jetzt etwas chaotischer aus, ist aber letztendlich genau noch die Empfehlung von Wolfgang Back. Ich hätte es natürlich auch schöner und übersichtlicher zeichnen können, aber beim Entwerfen des Platinenlayouts habe ich öfter mal Gateswapping und Pinswapping benutzt, damit die Leiterzüge besser geroutet werden können. Den ganzen Plan habe ich nochmal auf der Lochrasterplatte mit Lackdraht aufgebaut, bevor ich die Platine angefangen habe zu routen.
Noch kurz zu den Steuereingängen "Fwd" (JP2) und "Rev" (JP3). Durch das XOR-Gatter zur Freigabe des Schieberegisters, reicht ein Eingang zum Starten des Motors, der jeweils andere XOR-Eingang wird mit einem Widerstand auf High gehalten. Werden aber beide Eingänge nach Masse geschalten, geht das XOR-Gatter auf Low und das Schieberegister stoppt. Dieses Verhalten ist beabsichtigt und erlaubt es mir, Endabschalter an die Vitrine anzubauen, die den Steuertastern vom Bedienpult parallelgeschaltet werden. Dann wird beim Überfahren in einer Richtung der jeweils andere Eingang zusätzlich geschlossen und die Vitrine stoppt. Lässt man am Bedienpult los, fährt die Vitrine zurück, bis der Endabschalter wieder frei ist. In Ruhe sind beide XOR-Eingänge High und damit geht das Gatter auf Low, was das Schieberegister stoppt.
An Pin 8 des Treibers wird die Motorspannung angeschlossen. Mit der vorgesehenen Lötbrücke kann diese hier gleich auf die 5V-Leitung gelegt werden. Mein Motor läuft mit 5V zwar einwandfrei, hat aber zu wenig Drehmoment, um bei schneller Geschwindigkeit die Vitrine hochzufahren. Daher habe ich Pin 8 bei der fertigen Platine mit den gleichgerichteten 12V vor dem Spannungsregler verbunden.
Realisierung
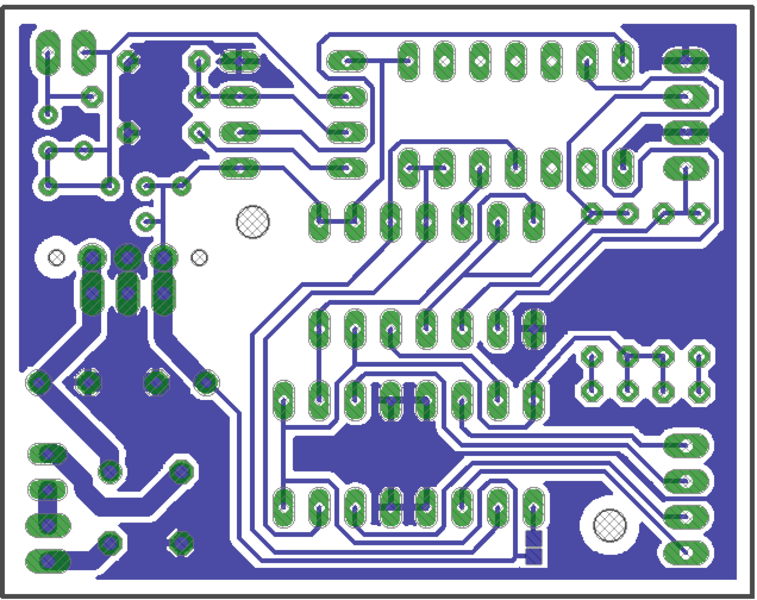
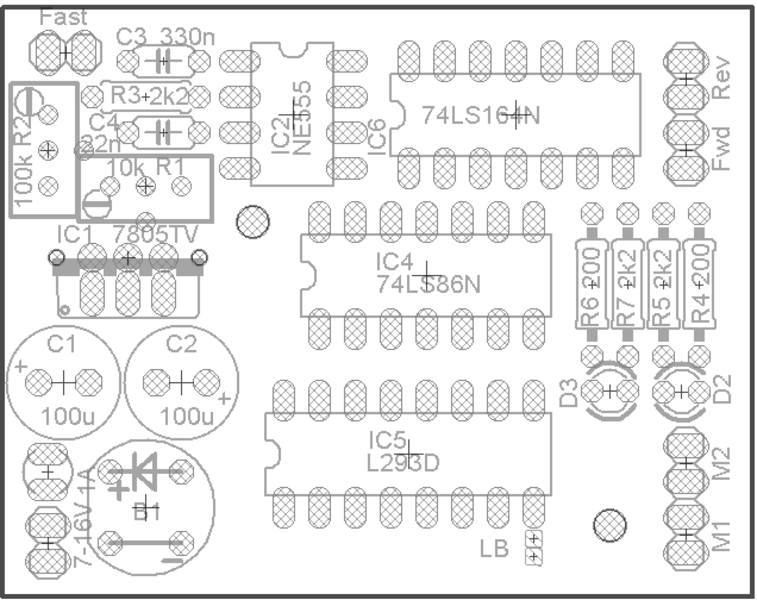
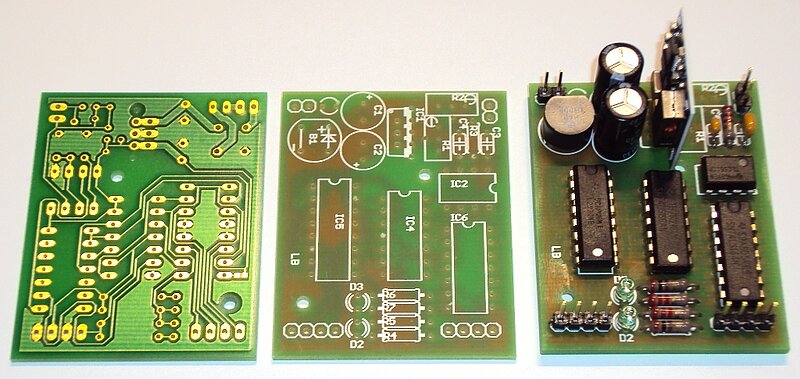
Das Layouten der Platine macht richtig dolle Spaß, hat aber auch wirklich recht lange gedauert, bis ich zufrieden war. Einen ganzen Monat (hey, das ist ein Freizeit-Projekt) habe ich den Entwurf immer wieder in die Ecke gelegt, neue Ideen (z.B. schalten nach Masse) eingebaut, wieder liegengelassen, usw. Letztendlich konnte ich alle ICs gleich ausrichten (außer den Timer), Widerstände konzentrieren und alle Anschlüsse am Rand platzieren und bin dabei bei einem einseitigen Layout geblieben. Für den Spannungswandler habe ich genügend Platz und zusätzliche Bohrlöcher vorgesehen, damit man hier verschiedene pinkompatible Bauteile einsetzen kann. Ursprünglich geplant und auch im Schaltplan gezeichnet ist der Linerarregler 7905 im TO220 mit Kühlkörper. Bei 12V Eingangsspannung und 1A halte ich den Kühlkörper hier für notwendig, da volle 7W Leistung verbraten werden. Eleganter ist der Einsatz des DC/DC-Wandlers Recom R-785, der kaum Verlustleistung aufweist. Ich habe vor einiger Zeit Muster des DC/DC-Wandlers muRata NGA10S15050DC erhalten, den ich dann tatsächlich eingebaut habe. Beim Routen bin ich in Gruppen vorgegangen und habe zuerst die Lastleitungen zum Motoranschluss aus dem Treiber-IC herausgeführt. Danach habe ich den Netzteil-Teil und den Timer-Teil fertiggestellt, da beide sehr kompakt bleiben sollten. Erst danach habe ich dem Autorouter extra viel Platz gegeben und ihn mal machen lassen. Hier habe ich immer wieder Pinswapping und Gateswapping der Gatter genutzt, um alternative Wege zu ermöglichen. Langsam kommt man dabei einem schönen Layout immer näher, indem man die Autorouterlösungen als Vorschläge benutzt, einige Leiterbahnen immer wieder auflöst und zum Schluss alles zusammenschiebt um Platz zu sparen. Das Ergebnis ist in den Bildern dokumentiert. Die fertige Baugruppe hat meinen liebsten Kritiker veranlasst zu fragen, wo ich das Teil gekauft hätte. Ein größeres Lob für die Arbeit konnte ich wohl kaum bekommen... Die Platine habe ich bei Q-Print herstellen lassen, inklusive Lötstopp und Bestückungsdruck. Leider hatte ich keinen Platz für ein "© Krm 2010" ;-)
Härtetest
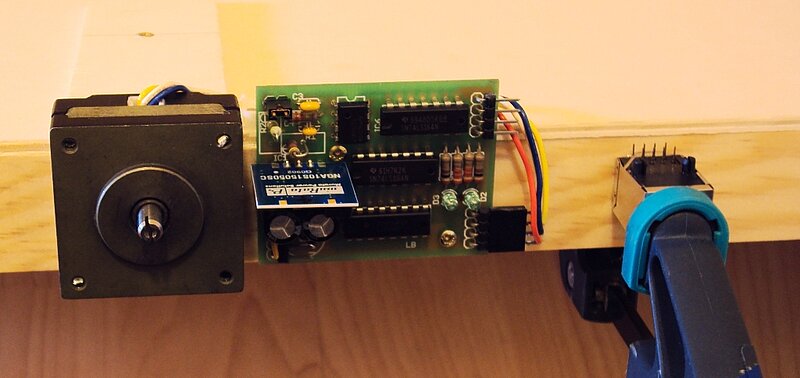
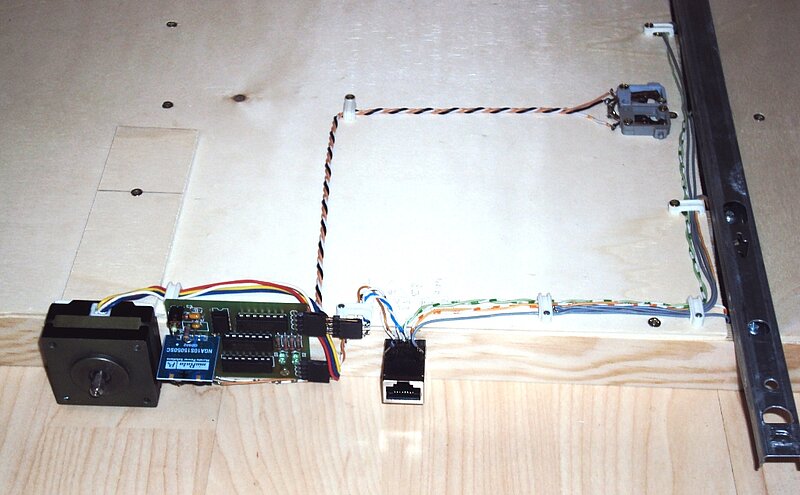
Die Schaltung wurde unter die letzte Leiste der Vitrine geschraubt. Außerdem habe ich eine RJ45-Buchse angeklebt, sodass ich ein einfaches LAN-Kabel verwenden konnte, die ganze Vitrine zu versorgen: 4x geschaltete Fahrspannung und Masse am Schirm, sowie 12V, GND, FWD, REV für die Steuerung.

